An exploration of the heart of neural audio codecs
compression
ssl
audio
quantization
Author
Scott H. Hawley
Published
June 12, 2023
Introduction
“Vector Quantization.” Sounds intimidating. “Residual Vector Quantization” sounds even more intimidating, even near-meaningless to most people. Turns out, these are easy to understand given a few pictures, even to the point a child could understand them – uh… if the child wanted to. Certainly, there can be sophisticated ways to implement these algorithms, and we’ll cover a bit of that later on, but the basics are very simple.
Residual Vector Quantization (RVQ) is a data compression technique found in state-of-the-art neural audio codecs such as Google’s SoundStream, and Facebook/Meta AI’s Encodec, which in turn form the backbone of generative audio models such as AudioLM (Google) and MusicGen (Facebook). It’s also the subject of Lucidrain’s library vector-quantize-pytorch, which we’ll use toward the end because it’s so fast and so good.
What is RVQ and how does it work?
First we should consider regular vector quantization (VQ). VQ has been around for decades, and it shows up in many areas of signal processing when compression is involved.
Note: Whenever I say something that applies to both VQ and RVQ, I’ll use the abbreviation “(R)VQ.”
TipTip: Two Analogies
Cities and Towns: RVQ is like a “hub-and-spoke” graph that often appears in logistics: Consider air travel, in which the major cities are “hubs” (Chicago, LA, Atlanta) from which you take smaller flights to get to smaller cities and towns. VQ would be like replacing every address with its nearest town – which could result in a lot of vectors! RVQ means we have a short list of hubs, then from each hub we have a list of smaller cities, from which we could then have lists connecting smaller cities to nearby towns.
Numbers and Digits: In one dimension, RVQ is like the way we represent numbers using digits. Instead of creating 10,000 separate categories for each of the integers from 0 to 9999, we use 4 “codebooks” (for thousands, hundreds, tens, and ones) consisting of the ten digits 0 through 9. 4 * 10 = 40, which is a lot less than 10,000! We even can represent real numbers to arbitrary precision by using more codebooks to include ever-smaller “residual vectors” to the right of the decimal point.
Vector Quantization = Partitioning Space
“Vector Quantization” is really about dividing up the space of your data points into a discrete set of regions. Put differently, we “partition” the space.
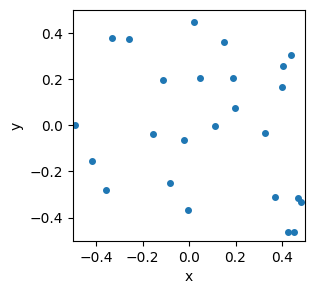
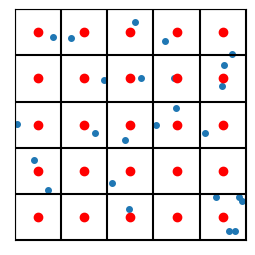
Let’s say we have a bunch of points in space:
Show the code
import numpy as np import matplotlib.pyplot as plt# make some datan_points =25DATA_MIN, DATA_MAX =-0.5, 0.5# we'll let these be globalsnp.random.seed(9) # for reproducibilitydata = DATA_MIN + (DATA_MAX-DATA_MIN)*np.random.rand(n_points, 2)# plot itfig, ax = plt.subplots(figsize=(3,3))ax.set_xlim(DATA_MIN, DATA_MAX)ax.set_ylim(DATA_MIN, DATA_MAX)#ax.set_xticks([]) # hide axis ticks#ax.set_yticks([])ax.set_xlabel('x')ax.set_ylabel('y')plt.scatter(data[:, 0], data[:, 1], s=16)plt.show()
Figure 1. A set of data points, aka ‘vectors’.
To computer scientists, the \((x,y)\) coordinates of each point define a “vector”. (To mathematicians and physicists, the “vector” points from the origin to each point, but that distinction isn’t going to matter to us.)
NoteClarification
For neural audio codecs, the vectors could be vertical slices (columns) from an audio spectrogram, i.e., a list of amplitudes for a set of frequencies that were found over a short time interval called a “frame.” More often, however, the vectors are themselves the outputs of some other audio encoder (e.g. a Convolutional Neural Network), and the (R)VQ is done to compress those encoded vectors even more in order to do things like Latent Diffusion.
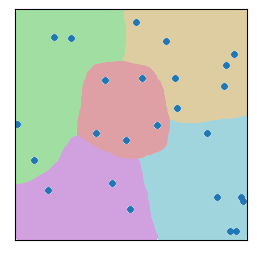
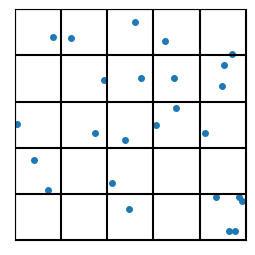
Now divide up the space into a bunch of regions. How we do that can take many forms. For now, just consider the two examples of my hand drawing with colors, and a set of tiled squares. There are “fancier” algorithms to partition the space in a way that best “fits” the data (e.g., see “k-Means”, below). We can cover schemes like the third image later.
(a) By hand
(b) Squares
(c) Fancy (credit: Aalto University, Finland)
Figure 2. Examples of ways to divide up or “quantize” space, aka “Partitioning schemes.”
Moving forward, I can do a bit more code-wise with the squares, so let’s start there. ;-)
Let me just formalize that a bit: We’ll let the number of squares be controlled by the variable “n_grid”. So for our two-dimensional examples, there will be n_grid\(^2\) square regions.
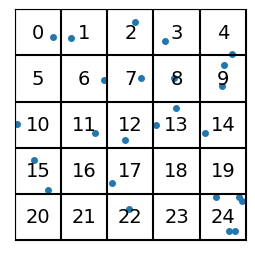
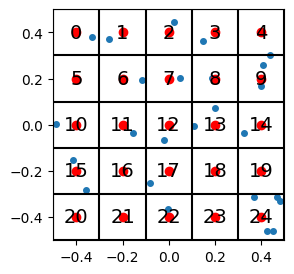
With vector quantization, we give an index value to every region (e.g. 0 to 24 for a 5x5 square grid), and then we replace each vector’s value with the index of the region.
Show the code
#| code-fold: true#| code-summary: "Show the code"import pandas as pd def plot_data_grid(data, n_grid=5, hide_tick_labels=True, show_indices=False, show_centroids=False, show_next_level_grid=False):"big ol' workhorse plotting routine that we'll progressively make use of as the lesson proceeds" fig, ax = plt.subplots(figsize=(3,3)) h =1.0/ n_grid ax.set_xlim(DATA_MIN, DATA_MAX) ax.set_ylim(DATA_MIN, DATA_MAX)for i inrange(n_grid +1): ax.axhline(DATA_MIN + i*h, color='black') ax.axvline(DATA_MIN + i*h, color='black')if show_indices: index =0for j inrange(n_grid):for i inrange(n_grid): x = DATA_MIN + (i +0.5) / n_grid y = DATA_MIN +1- (j +0.5) / n_grid ax.text(x, y, str(index), ha='center', va='center',fontsize=14) index +=1if show_centroids: for j inrange(n_grid):for i inrange(n_grid): x = DATA_MIN + (i +0.5)*h y = DATA_MIN + (j +0.5)*h ax.plot(x, y, 'ro', markersize=6)if hide_tick_labels: ax.set_xticks([]) ax.set_yticks([]) ax.set_aspect('equal')if data isnotNone: plt.scatter(data[:, 0], data[:, 1], s=16) plt.show()n_grid=5#plot_data_grid(data, n_grid=n_grid)plot_data_grid(data, n_grid=n_grid, show_indices=True)
Figure 3. (Integer) Indices for each region.
For each of the “vectors” represented by the data points, we no longer use the (\(x\),\(y\)) coordinate pairs, but rather the (integer) index of the region it’s in.
Note
We’ve gone from needing two floating point numbers per point to just one integer value. In two dimensions, the “savings” or data-compression amount that we get from that may not be readily apparent, but stick around: As we go to large numbers of dimensions later, this scheme will save us a ton of data.
If we want the coordinates that go with the indices, we’ll use the centroid of each region. In this sense, the vectors are “quantized” so that they can only take on values given by the centroids of the regions. In the following example, the centroids are shown in red:
So each blue point will effectively be replaced by the nearest red point. In this sense we have “quantized” the vectors (because we’ve quantized the space itself).
TipTerminology
The set of locations of centroids is called the “codebook”. When we want to use an actual vector value (in space), we convert the codebook index into a (centroid) location by looking up the codebook.
So a full (albeit unweidly) picture showing the data points, the region indices, and the centroids, looks like this:
When we do this quantization (i.e. replacing vectors by their nearest centroid), the centroid locations will naturally be a bit “off” compared to the original data vectors themselves. The finer the grid you make, the smaller the regions, and the less error. For a 2D grid, the error will be on the order of \(h^2\) where \(h\) is the grid spacing (\(h\) = 1/5 = 0.2 in our example).
Note
Note that the vectors in the codebook are not “basis vectors”: We do not add linear combinations of the codebook vectors, as that would not be “quantization” (and would subject us to the same number of data points as the original, resulting in nearly no compression). VQ helps us get around some problems of having large numbers of data points by approximating them by their nearest codebook vectors, and the R in RVQ allows us to increase the provide for good “resolution” within the space without requiring extremely long codebooks.
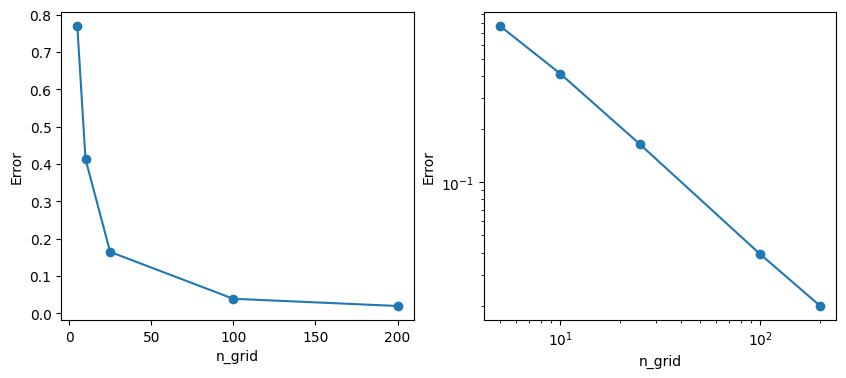
Let’s check how the error changes as we vary the grid spacing, i.e., as we vary n_grid.
Figure 6. Plots of error vs. resolution with linear (left) and logarithmic (right) axes. Note that the computational cost will scale like the number of regions, which is n_grid\(^2\).
So, the more “gridlines” you use, the lower the error, but at what cost? To get an error of 0.02 we need \(200^2 = 400\) regions. And in higher dimensions than 2, the “cost” of higher resolution / lower error goes up immensely: to double the resolution in \(d\) dimensions, the computational cost goes up by a factor of \(2^d\). (Imagine \(d\)=32, 64, 128,…)
But we don’t need to cover the entire space uniformly! That’s where Residual Vector Quantization comes in. Feel free to skip ahead to the section on RVQ. For the next bit we’ll take an optional aside to learn about an alternate way to partition space, known as a the “k-Means” algorithm.
Note
Another key point: By replacing all the coordinate values for a vector (i.e. \(d\) floating point numbers) with a single integer, VQ achieves data compression by a factor of \(d\) (times however many bit floats take up compared to integers). For large numbers of dimensions – regardless of the partitioning scheme – this compression can be significant.
k-Means (Partitioning Scheme)
CautionOptional
This discussion on k-Means is actually not crucial to understanding (R)VQ. At all. It’s quite skippable, to be honest. So…only read if you’re really curious. Otherwise skip down to the section on Residual Vector Quantization.
Details on k-Means
The k-Means algorithm is another method to partition space, a method that instead of static squares, will allow our regions and centroids to “follow the data”. Often k-Means is used to initialize an RVQ codebook for neural codecs (e.g. in SoundStream, Encodec, etc), after which the rest of the neural network’s training algorithm may refine the codebooks more.
We’ll start with a bunch of data points shown as small dark circles below, and a set of \(k\) “centroids” shown by the large colored circles. (They’re not actually “centroids” yet but we’ll get there).
Show the code
# lots of imports to try to get the plotly plots and animations to show!import plotly.io as piopio.renderers.default='notebook'import plotly.express as px from plotly.offline import plot, iplot, init_notebook_modeimport plotly.graph_objs as goinit_notebook_mode(connected=True)ndim =2# easier to do in 2d at firstnpoints =100np.random.seed(1)datak = DATA_MIN + (DATA_MAX-DATA_MIN)*np.random.rand(npoints, ndim) # make up some random data pointsk =5# k-Means parameter: number of clusters# start with random centroidscentroids = DATA_MIN +0.2+0.6*(DATA_MAX-DATA_MIN)*np.random.rand(k, ndim) # don't let the starting centroids be on the far edges of the plotorig_centroids = centroids.copy() # save these for later when we'll make a moviedef plot_kmeans(data, centroids, cluster_memb=None): # we'll leave a way to color the data points all_data = np.concatenate((data,centroids)) is_centroid = np.array( [1if i >= npoints else0for i inrange(all_data.shape[0])] , np.newaxis) sizes = is_centroid*3+1 cs = cluster_memb if cluster_memb isnotNoneelse-1+np.zeros( (data.shape[0],1) ,dtype=int) cs = np.append(cs, range(k)) # add the centroids plot_data = np.column_stack( (all_data, sizes, cs) ) columns = ['x','y','sizes','cluster'] df = pd.DataFrame( plot_data, columns=columns) fig = px.scatter(df, x="x", y="y", color='cluster', size='sizes', range_color=(-1,k), width=420, height=360, color_continuous_scale='Turbo') fig.update_layout(margin=dict(l=20, r=20, t=20, b=20),)#template='plotly_dark',)return figplot_kmeans(datak, centroids)
Figure 7. Initial state of k-Means, showing data without any ‘membership’ (dark dots) and random centroid locations (large colored dots)
That’s our starting points. Then what we’ll do is, we’ll color each point according to which centroid it’s closest to.
Warning
Yes, this can be very slow for lots of points in many dimensions. There is a whole field of study of how to speed up “nearest neighbors” types of algorithms. We’re going to keep it simple for this demo. Further down, the library we’ll use will actually do an “approximate k-Means” for speed.
Show the code
def distance(p1, p2):"euclidean distance squared. we don't need the square root b/c we're only interested in ordering by distance"return np.sum((p1-p2)**2, axis=1)def calc_cluster_membership(data, centroids): npoints = data.shape[0] min_ds =9999*np.ones(npoints) cluster_memb = np.zeros(npoints, dtype=int)-1for i, c inenumerate(centroids): # compute distances for all points ds = distance(data, c) inds = np.argwhere(ds < min_ds)if inds.size >0: min_ds[inds] = ds[inds] cluster_memb[inds] = iassertlen(cluster_memb)==npoints # we're not including the centroids themselves herereturn cluster_membcluster_memb = calc_cluster_membership(datak, centroids)plot_kmeans(datak, centroids, cluster_memb=cluster_memb)
Figure 8. First step in k-Means: Assign ‘membership’ of datapoints to different clusters based on which centroids (large dots) are nearest. Note that the ‘centroids’ in this graph aren’t true centroids yet. We’ll fix them in the next step after this.
The next step is to recalculate the centroid locations using the points that were assigned to each centroid. And these centroids are just the mean value of the points.
Show the code
def move_centroids(centroids, data, cluster_memb):for ki inrange(centroids.shape[0]): inds = np.argwhere( cluster_memb == ki)if inds.size >0:for dim inrange(data.shape[-1]): centroids[ki,dim] = np.mean(data[inds,dim], axis=0)return centroidscentroids = move_centroids(centroids, datak, cluster_memb)#print("These centroids should be fairly 'centered' in their respective groups of data.")plot_kmeans(datak, centroids, cluster_memb=cluster_memb)
Figure 9. Next step in k-Means: move centroids so they are in the middle of each cluster
…But now, having moved the centroids, the nearest-neighbor membership of some of the points may have changed. So we recalculate those:
Figure 10. Next step in k-Means: re-assign cluster membership of point based on new cluster locations
…And we repeat the process until some stopping criterion is met. For example we may just set a maximum iteration number, or we may stop when the centroids stop moving, or the cluster membership stops changing, etc. For this demo, we’ll just use a maximum number of iterations.
So, a movie of the whole process can look like this:
Show the code
centroids = orig_centroids.copy() # start overcluster_memb =-1+np.zeros( (datak.shape[0],1) ,dtype=int) maxiter =10plot_kmeans(datak, centroids, cluster_memb=cluster_memb)ts = np.arange(2*maxiter,dtype=int)columns = ['t','x','y','sizes','cluster','point_number']total_points = npoints + k # points + clustersmovie_data = np.zeros( (len(ts)*total_points, len(columns)) ) # giant data array for all data points at all timesmovie_data[:,0] = np.repeat(ts, total_points) # txs = np.concatenate( ( datak[:,0], centroids[:,0] ) ) # initial xsys = np.concatenate( ( datak[:,1], centroids[:,1] ) ) # initial ysmovie_data[:,1] = np.tile(xs, len(ts))movie_data[:,2] = np.tile(ys, len(ts))sizes = np.ones(total_points,dtype=int)sizes[-k:] =3movie_data[:,3] = np.tile(sizes, len(ts)) # sizes is repeated for all timescs =-2+ np.ones(total_points,dtype=int)cs[-k:] = np.arange(k, dtype=int)movie_data[:,4] = np.tile(cs, len(ts))movie_data[:,5] = np.tile(np.arange(total_points), len(ts)) # point_number is repeated for all timefor t in ts:if t==0: continue# leave initial data as step 0elif t %2==1: cluster_memb = calc_cluster_membership(datak, centroids)else: centroids = move_centroids(centroids, datak, cluster_memb) start, end = t*total_points, (t+1)*total_points movie_data[start:end, 1] = np.concatenate( (datak[:,0], centroids[:,0]) ) # xs movie_data[start:end, 2] = np.concatenate( (datak[:,1], centroids[:,1]) ) # ys movie_data[start:end, 4] = np.concatenate( (cluster_memb, np.arange(k, dtype=int)) ) # cluster membershipdf = pd.DataFrame(movie_data, columns=columns)#df['cluster'] = df['cluster'].astype(int).astype(str) # use discrete colormap#display(df)fig = px.scatter(df, x="x", y="y", animation_frame="t", animation_group="point_number", color="cluster", hover_name="cluster", hover_data=['point_number'], size='sizes', width=420, height=460, range_color=(-1,k), color_continuous_scale='Turbo' )fig.update_layout( margin=dict(l=20, r=20, t=30, b=10),)# template='plotly_dark',)fig.layout.updatemenus[0].buttons[0].args[1]["transition"]["duration"] =0# don't interpolate framesdisplay(fig)#print( "Caption: In this movie, each step will either be the 'membership' step or \nthe 'centroid moving' step.")
Figure 11. (Interactive) In this movie, each time step is either the ‘cluster membership’ step or the ‘centroid moving’ step.
For those who are interested, I’ll put the code for a working k-Means algorithm below – it’s short!
The end result of k-Means, since it is a kind of “nearest neighbors” algorithm, is set of vectors grouped according to a “Vornonoi diagram” like the one shown near the beginning of this post, which we’ll show again for good measure:
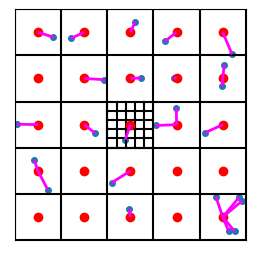
The trick with RVQ is, rather than having a single high-resolution codebook, to instead have “codebooks inside of codebooks”, or, if you like, “stacking codebooks”. Let’s say we want to quintuple the resolution of our initial 5x5 grid. Instead of using a 25x25 grid (which would be 25x the computational cost of the original), what if we put a little 5x5 grid “inside” the region to which a vector was quantized?
For example, in the “middle” region (region 12), we can do…
Show the code
from matplotlib import collections as mcdef get_region_membership(data:np.array, h=0.2, codebook=None):"Tells which region each point is in. TBD: this is slow but it works! ;-) " memb = np.zeros(data.shape[0], dtype=np.int32)if codebook isNone: # just assume basic squaresfor di, p inenumerate(data): i = (p[0]-DATA_MIN) // h j = (p[1]-DATA_MIN) // h ind = i + j*n_grid memb[di] = indelse: memb = calc_cluster_membership(data, codebook)return membdef plot_data_grid_with_resids(data, n_grid=5, hide_tick_labels=True, show_indices=False, show_centroids=False, show_next_level_grid=False, show_resids=True, codebook=None, show_grid=True):"big ol' workhorse plotting routine that we'll progressively make use of as the lesson proceeds" fig, ax = plt.subplots(figsize=(3,3)) h =1.0/ n_grid ax.set_xlim(DATA_MIN, DATA_MAX) ax.set_ylim(DATA_MIN, DATA_MAX)if show_grid:for i inrange(n_grid +1): ax.axhline(DATA_MIN + i*h, color='black') ax.axvline(DATA_MIN + i*h, color='black')if show_next_level_grid: # draws lines in the middle x_start =2*h y_start =-h/2for i inrange(n_grid): # horizontal lines y = y_start + i*h/n_grid ax.axhline(y, xmin=x_start, xmax=x_start+h, color='black') y_start, x_start = x_start, y_startfor j inrange(n_grid): # horizontal lines x = x_start + j*h/n_grid ax.axvline(x, ymin=y_start, ymax=y_start+h, color='black')if show_indices: index =0for j inrange(n_grid):for i inrange(n_grid): x = DATA_MIN + (i +0.5) / n_grid y = DATA_MIN +1- (j +0.5) / n_grid ax.text(x, y, str(index), ha='center', va='center',fontsize=14) index +=1if show_centroids: for j inrange(n_grid):for i inrange(n_grid): x = DATA_MIN + (i +0.5)*h y = DATA_MIN + (j +0.5)*h ax.plot(x, y, 'ro', markersize=6)if show_resids and codebook isnotNone: memb = get_region_membership(data, codebook=codebook) resids = data*0 lines = []for i, p inenumerate(data):#resids[i] = p - codebook[memb[i]] # don't actually need to compute resids for this lines.append([p, codebook[memb[i]] ] ) lc = mc.LineCollection(lines, colors=(1,0,1,1), linewidths=2) ax.add_collection(lc)if hide_tick_labels: ax.set_xticks([]) ax.set_yticks([]) ax.set_aspect('equal')if data isnotNone: plt.scatter(data[:, 0], data[:, 1], s=16) plt.show()n_grid=5codebook = generate_codebook(n_grid)plot_data_grid_with_resids(data, n_grid=n_grid, show_next_level_grid=True, show_centroids=True, hide_tick_labels=False, codebook=codebook, show_resids=False)
Figure 13. Illustration of ‘codebook within a codebook’, with a smaller 5x5 codebook which will be relative to the middle region’s codebook.
The difference between that blue point in the middle “main” square and its corresponding red centroid will be the “residual”. We will also quantize that within the “little” 5x5 grid. This will serve as a codebook to use “after” the original codebook. And we’ll get the same resolution as if we had a 25x25 grid, except our computational cost will instead be 2*(5*5)=50 instead of 25*25=625! So our cost will be 12.5 smaller than the full-grid approach.
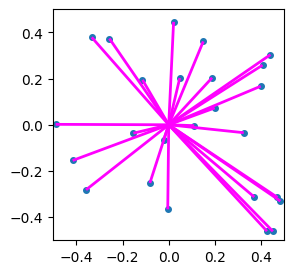
And interestingly, if we only consider the residual, i.e. the difference between the main centroid and the vector in question, then we can use the same “next level” codebook for all points in the space! In the following figure, we show the residuals as purple line segments that run from each point to its corresponding nearest centroid:
Figure 14. Illustration of redisuals, shown as purple line segments connecting vectors (blue points) with their nearest centroids (red points).
Also, because we cleverly set up our data to be centered around the origin \((0,0)\), we can treat the original data points as “residuals” relative to the “centroid” of the whole domain, namely the origin!
Figure 15. How we can treat the data points themselves as residuals relative to the origin, for a ‘level 0’ codebook
Also because of our clever choice of coordinates, for the next “level” of quantization, we can take the codebook at the next level to be just the previous codebook divided by n_grid! This won’t always be the case; I’m just feeling clever and lazy.
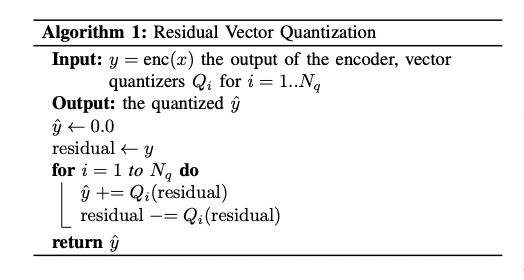
Quantizer algorithm
Up til now, we’ve hidden the code by default. But to really get the RVQ method, I’m going to show the code.
Let’s write a general quantizer multiple “levels” of nested codebooks. It will take our data points and return the various levels of codebook indices.
def quantizer(data, codebooks, n_grid=5):"this will spit out indices for residuals in a series of 'nested' codebooks" resids = data indices = []for cb in codebooks: indices_l = get_region_membership(resids, codebook=cb) resids = resids - cb[indices_l] indices.append(indices_l)return np.array(indices)# Make the nested codebooksn_codebooks =3codebook = generate_codebook(n_grid)codebooks = [codebook/n_grid**level for level inrange(n_codebooks)]indices = quantizer(data, codebooks) # call the quantizerdisplay(indices)
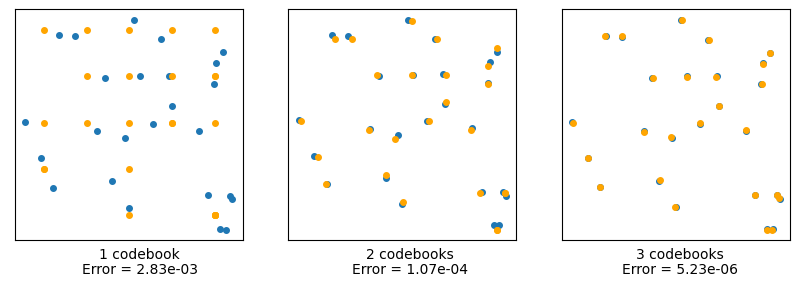
Let’s test this by trying to reconstruct our original data using each level of codebook. In the following, the original data will be in blue, and the other colors will show the results of quantization using an increasing number of codebooks:
Figure 17. Reconstructing data (blue points) using multiple levels of RVQ codebooks (orange dots)
We see that the more (levels of) codebooks we use, the better we can approximate the original data. The rightmost image has an effective resolution of \(5^3 = 125\) little squares, but instead uses only \(5x5x3 = 75\). In two dimensions, this is not a huge savings, but let’s see how important this is for higher numbers of dimensions.
Let \(d\) be the number of dimensions and \(K\) be the number of codebooks (no relation to the k from k-Means, I’m afraid). We’ll populate a d-dimensional hypercube with a lot of data, and subdivide it into nested groups of little hypercubes using RVQ, and compute the error – as well as the compuational cost “savings” from if we had used regular VQ instead of RVQ.
Note
Using uniform square/(hyper)cube regions is a really dumb idea for this. Because the number of regions will scale like n_grid\(^d\), which can actually be much larger than the number of data vectors we have! We’ll try a more sophisticated partitioning scheme further below.
Show the code
#### label: fig-rvq-recon-highdim2#### fig-cap: "Error for high-dimensional datasets using various levels of RVQ. 'cost savings factor' refers to the ratio of using regular VQ (at uniform resolution) vs RVQ"d_choices = [2, 3, 4, 6] # we can't go much higher with 5x5 uniform grids!K_choices = [1,2,3,4] # variable numbers of codebooksnpoints_hd =1000# points in high-dim spacesprint("Here we show the error for high-dimensional datasets using various levels of RVQ.")print("'cost savings factor' refers to the ratio of using regular VQ (at uniform resolution)\nvs RVQ.")for d in d_choices:print(f"\nd = {d}:") np.random.seed(1) data_hd = DATA_MIN + (DATA_MAX-DATA_MIN)*np.random.rand(npoints_hd, d) codebook0 = generate_codebook(n_grid, n_dim=d) codebooks = [codebook0/n_grid**level for level inrange(max(K_choices))] # lets get this over with rather than in the loopfor K in K_choices: indices = quantizer(data_hd, codebooks) recon = data_hd*0for lil_k inrange(K): # reconstruct using all codebooks recon += codebooks[lil_k][indices[lil_k]] error = ((recon - data_hd)**2).mean() grid_0_points = n_grid**(d) rvq_points = grid_0_points*K uni_res = grid_0_points**K # comparable uniform resolution savings = uni_res/rvq_pointsprint(f" K = {K}, error = {error:.2e}, cost savings factor = {savings:.1f}")pass
Here we show the error for high-dimensional datasets using various levels of RVQ.
'cost savings factor' refers to the ratio of using regular VQ (at uniform resolution)
vs RVQ.
d = 2:
K = 1, error = 3.41e-03, cost savings factor = 1.0
K = 2, error = 1.29e-04, cost savings factor = 12.5
K = 3, error = 5.26e-06, cost savings factor = 208.3
K = 4, error = 2.16e-07, cost savings factor = 3906.2
d = 3:
K = 1, error = 3.37e-03, cost savings factor = 1.0
K = 2, error = 1.29e-04, cost savings factor = 62.5
K = 3, error = 5.31e-06, cost savings factor = 5208.3
K = 4, error = 2.18e-07, cost savings factor = 488281.2
d = 4:
K = 1, error = 3.36e-03, cost savings factor = 1.0
K = 2, error = 1.32e-04, cost savings factor = 312.5
K = 3, error = 5.34e-06, cost savings factor = 130208.3
K = 4, error = 2.16e-07, cost savings factor = 61035156.2
d = 6:
K = 1, error = 3.37e-03, cost savings factor = 1.0
K = 2, error = 1.33e-04, cost savings factor = 7812.5
K = 3, error = 5.35e-06, cost savings factor = 81380208.3
K = 4, error = 2.16e-07, cost savings factor = 953674316406.2
Those “cost savings factors” were artifically high though, because we’re still using squares/hypercubes for our regions, and we don’t need to shape them that way and we don’t need that many of them. The great thing about (R)VQ is that you can specify how many centroids you want – i.e. how “long” you want your codebook to be – and you can keep that to some manageable number even as the number of dimensions skyrockets.
So, to tackle higher dimensions, we need to stop using uniform squares so we can have a codebook “length” of less than a few thousand centroids (instead of what just had, which was going into the hundreds of thousands, e.g. \(5^8 = 390625\)). To get our non-uniform regions that follow the data, we’ll use the k-Means method described above.
Let’s look at how the reconstruction error behaves in high dimensions.
Error Analysis: Exponential Convergence
We can try a given number of (initially) random centroids, and try to match them to the data via k-Means.
Note
The residuals at different levels of our RVQ calculations will likely have different data distributions. Which means that instead of “sharing (scaled) codebooks” like we did before, we’ll need to re-calculate a new codebook at each “level”. Otherwise we won’t see any advantage from RVQ (trust me I tried).
In the following calculation, we’ll vary the number of dimensions, the length of the codebooks, and the number of codebooks, and see how these all affect the reconstruction error.
The following set of error values is a “wall of numbers” which may not interest you. Feel free to scroll past it and skip down to the graphical representation of (some of) the numbers.
Show the code
import torchfrom vector_quantize_pytorch import ResidualVQfrom functools import partial def make_pretty(d,styler): styler.set_caption(f"d = {d}:") styler.format(lambda e: f'{10**e:0.1e}') # undo the log op styler.background_gradient(axis=None, vmin=-12, vmax=1, cmap="plasma")return stylerdef show_colored_data(results_d, d, cb_lengths, K_choices):"displays a dataframe table but colors the background according to log10 of the numbers" rdf = pd.DataFrame(np.log10(results_d.numpy()), columns=[f'K = {k}'for k in K_choices], index=[f'cb_len = {c}'for c in cb_lengths]) ourfunc = partial(make_pretty,d) display(rdf.style.pipe(ourfunc))returnn_dim =256# number of dimensionscb_len =256# codebook lengthK =4# number of codebooksnpoints_hd =4096# number of data points in high-dim spaced_choices = [2, 3, 6, 8, 16, 32, 64, 128, 256, 512] # dimensions to trycb_lengths = [25, 64, 256, 1024, 2048] # codebook lengthsK_choices = [1,2,3,4,6,8,10]#,16] # variable numbers of codebooksresults = torch.empty( ( len(d_choices), len(cb_lengths), len(K_choices) )).cpu()for q1, n_dim inenumerate(d_choices):#print(f"\nd={n_dim:4}: {' '.join([f' K={i}' for i in K_choices])}")for q2, cb_len inenumerate(cb_lengths):#print(f" cb_len={cb_len:4}: ",end="")for q3, K inenumerate(K_choices): residual_vq = ResidualVQ( dim = n_dim, codebook_size = cb_len, num_quantizers = K, kmeans_init =True, # set to True kmeans_iters =10# number of kmeans iterations to calculate the centroids for the codebook on init ) torch.manual_seed(0) x = torch.randn(1, npoints_hd, n_dim) quantized, indices, commit_loss = residual_vq(x) error = ((quantized - x)**2).mean()#print(f" {error:.1e} ", end="") results[q1,q2,q3] = error#print() show_colored_data(results[q1], n_dim, cb_lengths, K_choices)
Table 1. d = 2:
K = 1
K = 2
K = 3
K = 4
K = 6
K = 8
K = 10
cb_len = 25
7.5e-02
6.8e-03
8.9e-04
1.2e-04
4.8e-06
1.1e-07
2.6e-09
cb_len = 64
3.1e-02
1.7e-03
1.3e-04
1.3e-05
2.1e-07
3.5e-09
6.9e-11
cb_len = 256
8.5e-03
1.9e-04
7.4e-06
4.5e-07
3.1e-09
1.8e-11
1.5e-13
cb_len = 1024
2.0e-03
2.4e-05
9.6e-07
6.1e-08
9.4e-11
4.8e-14
3.5e-15
cb_len = 2048
6.0e-04
1.8e-06
3.9e-08
7.8e-10
1.4e-12
3.8e-15
1.4e-15
Table 2. d = 3:
K = 1
K = 2
K = 3
K = 4
K = 6
K = 8
K = 10
cb_len = 25
1.8e-01
3.5e-02
7.7e-03
1.8e-03
1.3e-04
1.0e-05
9.1e-07
cb_len = 64
9.8e-02
1.1e-02
1.4e-03
2.2e-04
5.7e-06
2.7e-07
5.8e-09
cb_len = 256
3.6e-02
1.7e-03
9.8e-05
9.6e-06
1.1e-07
1.8e-09
4.2e-11
cb_len = 1024
1.2e-02
2.7e-04
8.0e-06
4.5e-07
1.5e-09
4.2e-12
2.4e-14
cb_len = 2048
4.4e-03
4.7e-05
9.3e-07
2.5e-08
7.5e-12
3.8e-15
1.8e-15
Table 3. d = 6:
K = 1
K = 2
K = 3
K = 4
K = 6
K = 8
K = 10
cb_len = 25
4.3e-01
1.9e-01
8.2e-02
3.7e-02
8.6e-03
2.1e-03
5.5e-04
cb_len = 64
3.2e-01
1.0e-01
3.3e-02
1.1e-02
1.3e-03
1.7e-04
2.2e-05
cb_len = 256
1.8e-01
3.2e-02
6.0e-03
1.1e-03
4.0e-05
1.5e-06
5.6e-08
cb_len = 1024
8.0e-02
6.7e-03
5.8e-04
5.0e-05
4.0e-07
3.6e-09
3.0e-11
cb_len = 2048
3.8e-02
1.6e-03
7.9e-05
3.6e-06
1.1e-08
4.5e-11
2.5e-13
Table 4. d = 8:
K = 1
K = 2
K = 3
K = 4
K = 6
K = 8
K = 10
cb_len = 25
5.3e-01
2.8e-01
1.5e-01
8.2e-02
2.4e-02
7.7e-03
2.6e-03
cb_len = 64
4.2e-01
1.7e-01
7.4e-02
3.2e-02
6.2e-03
1.2e-03
2.6e-04
cb_len = 256
2.7e-01
7.1e-02
1.9e-02
5.2e-03
3.9e-04
3.0e-05
2.2e-06
cb_len = 1024
1.3e-01
1.8e-02
2.5e-03
3.5e-04
6.6e-06
1.3e-07
2.7e-09
cb_len = 2048
6.6e-02
4.7e-03
3.4e-04
2.8e-05
1.8e-07
1.6e-09
1.5e-11
Table 5. d = 16:
K = 1
K = 2
K = 3
K = 4
K = 6
K = 8
K = 10
cb_len = 25
7.3e-01
5.3e-01
3.9e-01
2.8e-01
1.5e-01
7.9e-02
4.2e-02
cb_len = 64
6.4e-01
4.0e-01
2.6e-01
1.6e-01
6.6e-02
2.7e-02
1.1e-02
cb_len = 256
4.9e-01
2.4e-01
1.2e-01
5.6e-02
1.3e-02
3.2e-03
7.8e-04
cb_len = 1024
3.0e-01
9.0e-02
2.7e-02
8.1e-03
7.7e-04
7.6e-05
7.4e-06
cb_len = 2048
1.6e-01
2.8e-02
4.7e-03
7.6e-04
2.7e-05
1.0e-06
3.8e-08
Table 6. d = 32:
K = 1
K = 2
K = 3
K = 4
K = 6
K = 8
K = 10
cb_len = 25
8.5e-01
7.2e-01
6.1e-01
5.1e-01
3.7e-01
2.6e-01
1.9e-01
cb_len = 64
7.8e-01
6.1e-01
4.8e-01
3.8e-01
2.3e-01
1.4e-01
8.7e-02
cb_len = 256
6.7e-01
4.4e-01
3.0e-01
2.0e-01
9.0e-02
4.1e-02
1.8e-02
cb_len = 1024
4.6e-01
2.2e-01
1.0e-01
4.7e-02
9.9e-03
2.3e-03
5.1e-04
cb_len = 2048
2.7e-01
7.1e-02
1.9e-02
5.1e-03
4.2e-04
3.6e-05
2.6e-06
Table 7. d = 64:
K = 1
K = 2
K = 3
K = 4
K = 6
K = 8
K = 10
cb_len = 25
9.1e-01
8.4e-01
7.6e-01
7.0e-01
5.8e-01
4.8e-01
4.0e-01
cb_len = 64
8.7e-01
7.6e-01
6.7e-01
5.8e-01
4.5e-01
3.5e-01
2.7e-01
cb_len = 256
7.9e-01
6.6e-01
5.5e-01
4.5e-01
3.2e-01
2.2e-01
1.5e-01
cb_len = 1024
5.8e-01
3.4e-01
2.0e-01
1.2e-01
4.2e-02
1.5e-02
5.6e-03
cb_len = 2048
3.5e-01
1.2e-01
4.3e-02
1.5e-02
2.4e-03
3.6e-04
5.2e-05
Table 8. d = 128:
K = 1
K = 2
K = 3
K = 4
K = 6
K = 8
K = 10
cb_len = 25
9.5e-01
9.1e-01
8.6e-01
8.2e-01
7.4e-01
6.7e-01
6.0e-01
cb_len = 64
9.3e-01
8.6e-01
8.0e-01
7.4e-01
6.4e-01
5.6e-01
5.1e-01
cb_len = 256
8.6e-01
7.9e-01
7.2e-01
6.5e-01
5.4e-01
4.4e-01
3.6e-01
cb_len = 1024
6.5e-01
4.7e-01
3.4e-01
2.5e-01
1.3e-01
6.0e-02
2.6e-02
cb_len = 2048
4.1e-01
2.0e-01
9.3e-02
4.4e-02
8.3e-03
1.8e-03
8.4e-05
Table 9. d = 256:
K = 1
K = 2
K = 3
K = 4
K = 6
K = 8
K = 10
cb_len = 25
9.7e-01
9.4e-01
9.2e-01
8.9e-01
8.4e-01
8.0e-01
7.5e-01
cb_len = 64
9.5e-01
9.1e-01
8.7e-01
8.4e-01
7.8e-01
7.4e-01
7.1e-01
cb_len = 256
8.9e-01
8.3e-01
7.6e-01
7.0e-01
5.9e-01
5.0e-01
4.2e-01
cb_len = 1024
6.9e-01
5.2e-01
3.8e-01
2.8e-01
1.5e-01
7.8e-02
4.4e-02
cb_len = 2048
4.4e-01
2.2e-01
1.1e-01
5.2e-02
1.2e-02
2.3e-03
2.6e-04
Table 10. d = 512:
K = 1
K = 2
K = 3
K = 4
K = 6
K = 8
K = 10
cb_len = 25
9.8e-01
9.7e-01
9.5e-01
9.3e-01
9.0e-01
8.7e-01
8.4e-01
cb_len = 64
9.7e-01
9.4e-01
9.3e-01
9.1e-01
8.8e-01
8.4e-01
8.0e-01
cb_len = 256
9.1e-01
8.6e-01
7.9e-01
7.3e-01
6.3e-01
5.4e-01
4.6e-01
cb_len = 1024
7.1e-01
5.3e-01
3.9e-01
2.9e-01
1.5e-01
8.2e-02
4.5e-02
cb_len = 2048
4.6e-01
2.2e-01
1.1e-01
5.0e-02
1.2e-02
2.3e-03
6.1e-04
Clarification: RVQ with K=1 is the same thing a regular VQ.
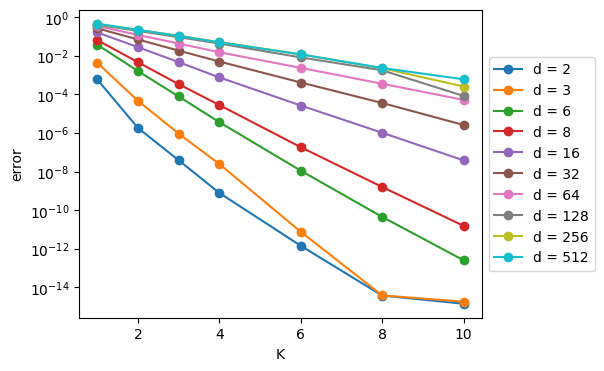
Figure 20. Reconstruction error for codebook length of 2048 with various data dimensions and number of codebooks (K). (Logarithmic z-axis)
Note that in the last figure, we see straight lines1 across as we vary K, and the K-axis is linear and the error axis is logarithmic.\(^*\) What this means is – and this is a major takeway:
TipBig Idea
As we add codebooks to the RVQ algorithm, the error decreases exponentially!
This is a big “selling point” for the RVQ method: you get an exponential payoff in error reduction for a linear increase in computational cost.
Addendum: Difficulty at Very High Dimensions
However, the above results also indicate that, for very high dimensions (say, \(d \geq 128\)), (R)VQ doesn’t offer nearly as big of a payoff as is does for lower dimensions – adding more and larger codebooks doesn’t have that much of an effect on the errors.
For this reason, in their brand new2 paper “High-Fidelity Audio Compression with Improved RVQGAN”, the Descript team choose to project down to a lower-dimensional space (\(d=8\)) first, using Linear layers, and then perform RVQ, and then project back up using another set of Linear Layers.
…Pausing here for now. There’s more that we could say and do – for example, “How do you do backpropagation with RVQ?” – but this seems like a good place to pause this discussion.
Acknowledgement
Thanks to Zach Evans of Harmonai for the impetus to look into this topic, and for helpful discussions and corrections while I was writing.
(c) 2023 Scott H. Hawley
Footnotes
Yes, the lines flatten out when we reach machine precision of \(10^{-15}\); don’t worry about that.↩︎
Brand new” as in “came out while I was finishing this post”!↩︎